「原作者へ」
連絡先を存じ上げませんでしたので、不本意ながら無断で翻訳しました。
正式に翻訳を許可されたいです。
gogyzzz@gmail.comでご連絡ください。
아래 포스트의 번역입니다.
http://work-in-progress.hatenablog.com/entry/2018/06/17/100622
이전편에 이어서
Backpropagation에 의한 파라미터 업데이트를 따라가보자.
Softmax의 출력결과(확률)이 아래와 같이 있다고 치자(정답이 되는 pdf-class만 표시).

(소수점 여섯째자리부터는 버림)
확률의 역수에 weight을 곱한 것을 구하자(여기서 weight는 전부 1)

(소수점 셋째자리부터 버림)
확률이 낮은 것일수록 값(=오차)는 커진다.
이 값을 가지고 이전 component의 오차를 구해가면서 파라미터를 업데이트해간다.
Propagation에 의한 프레임의 전이가 아래와 같이 있다고 치자.
(splice、FixedAffine(LDA변환)이 끝난 상태부터 시작)

< 그림의 설명 >
주황색 원은 프레임의 데이터를 나타냄
" A x B"는 데이터의 행 수 A, 열 수 B를 나타냄("mini"는 미니배치 사이즈, 여기선 64)
화살표는 각 component를 나타냄
error backpropagation(1)
일단은 「Softmax」 component부터
nnet2/nnet-component.cc
in_deriv->DiffSoftmaxPerRow(out_value, out_deriv);

< 그림의 설명 >
녹색의 원이 프레임의 오차 데이터를 나타냄 (차원수는 주황색 원과 같음)
그림 내의 1이 소스의 out_value에 해당
그림 내의 2가 소스의 out_deriv에 해당
그림 내의 3이 소스의 in_deriv에 해당
error backpropagation(2)
이어서, 「AffineComponentPreconditionedOnline」 component.
nnet2/nnet-component.cc
in_deriv->AddMatMat(1.0, out_deriv, kNoTrans, linear_params_, kNoTrans, 0.0);

< 그림의 설명 >
그림 내의 1이 소스의 out_deriv에 해당
그림 내의 2가 소스의 linear_params_"(모델의 파라미터 부분)에 해당
그림 내의 3이 in_deriv에 해당
또한, input layer와 output 오차를 가지고 모델의 파라미터를 업데이트 함

error backpropagation(3)
이어서, 「Normalize」 component.
nnet2/nnet-component.cc
cu::DiffNormalizePerRow(in_value, out_deriv, BaseFloat(1), false, in_deriv);

< 그림의 설명 >
그림 내의 1이 소스의 out_value에 해당
그림 내의 2가 소스의 out_deriv에 해당
그림 내의 3이 소스의 in_deriv에 해당
error backpropagation(4)
이어서, 「Pnorm」 component.
nnet2/nnet-component.cc
in_deriv->DiffGroupPnorm(in_value, out_value, out_deriv, p_);
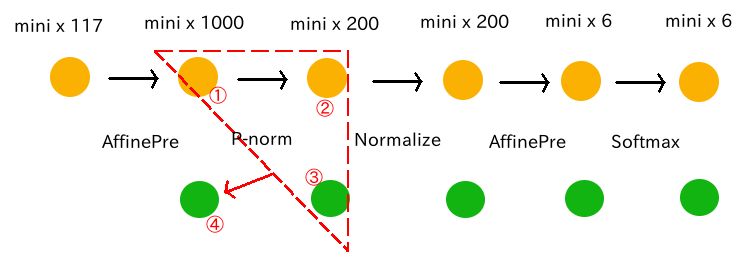
< 그림의 설명 >
그림 내의 1이 소스의 in_value에 해당
그림 내의 2가 소스의 out_value에 해당
그림 내의 3이 소스의 out_deriv에 해당
그림 내의 4가 소스의 in_deriv에 해당
error backpropagation(5)
이어서, 「AffineComponentPreconditionedOnline」 component.
nnet2/nnet-component.cc
in_deriv->AddMatMat(1.0, out_deriv, kNoTrans, linear_params_, kNoTrans, 0.0);

< 그림의 설명 >
그림 내의 1이 소스의 out_deriv에 해당
그림 내의 2가 소스의 linear_params_"(모델의 파라미터 부분)에 해당
그림 내의 3이 in_deriv에 해당
마찬가지로, input 값과 output 오차를 가지고 모델의 파라미터를 업데이트 한다.

댓글 없음:
댓글 쓰기